
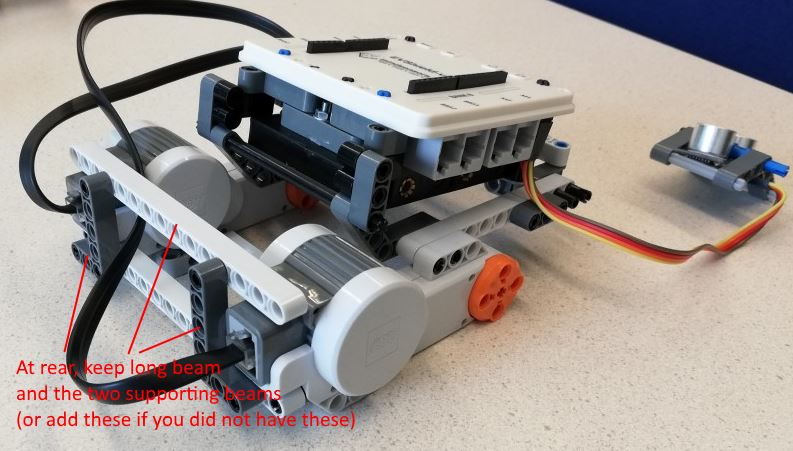
To quickly change the Spike into an Explorer robot, you can strip legs, claws and tail, leaving the chassis as a basis to build the Explorer robot.
Then add wheels, a bumper with touch sensor and an ultrasonic sensor mounted on a motor. You can also build the Explorer from scratch, then you can follow the guide on nxtprograms.com, with minor adaptions if using the EVShield.
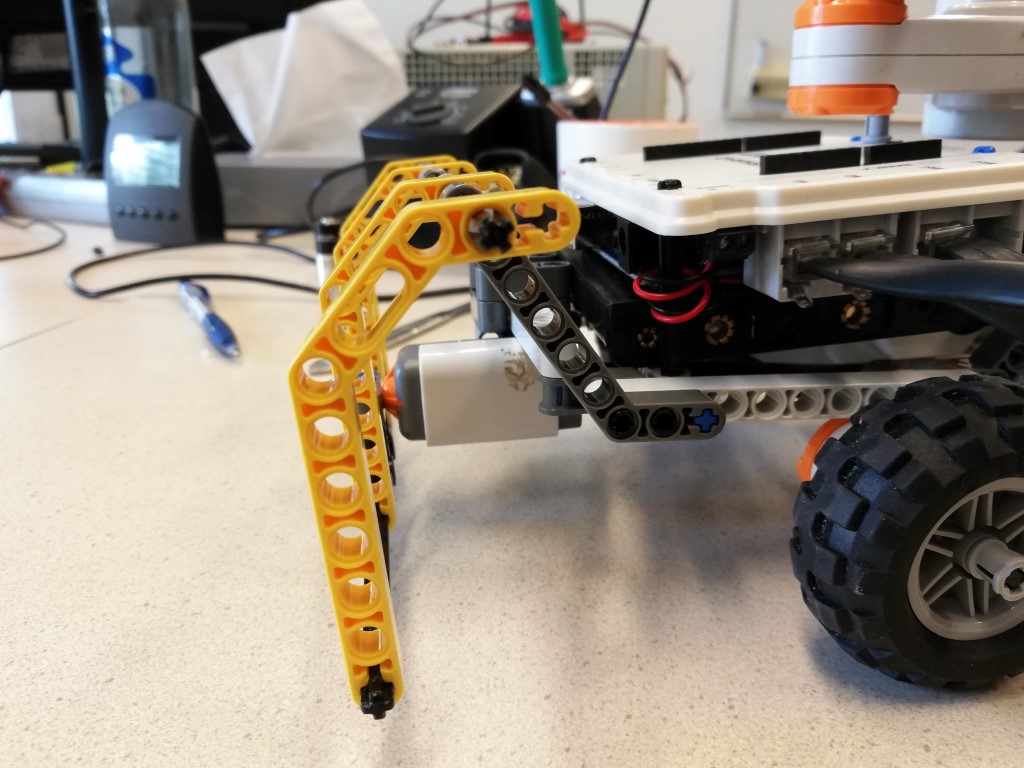
Strip legs, claws and tail
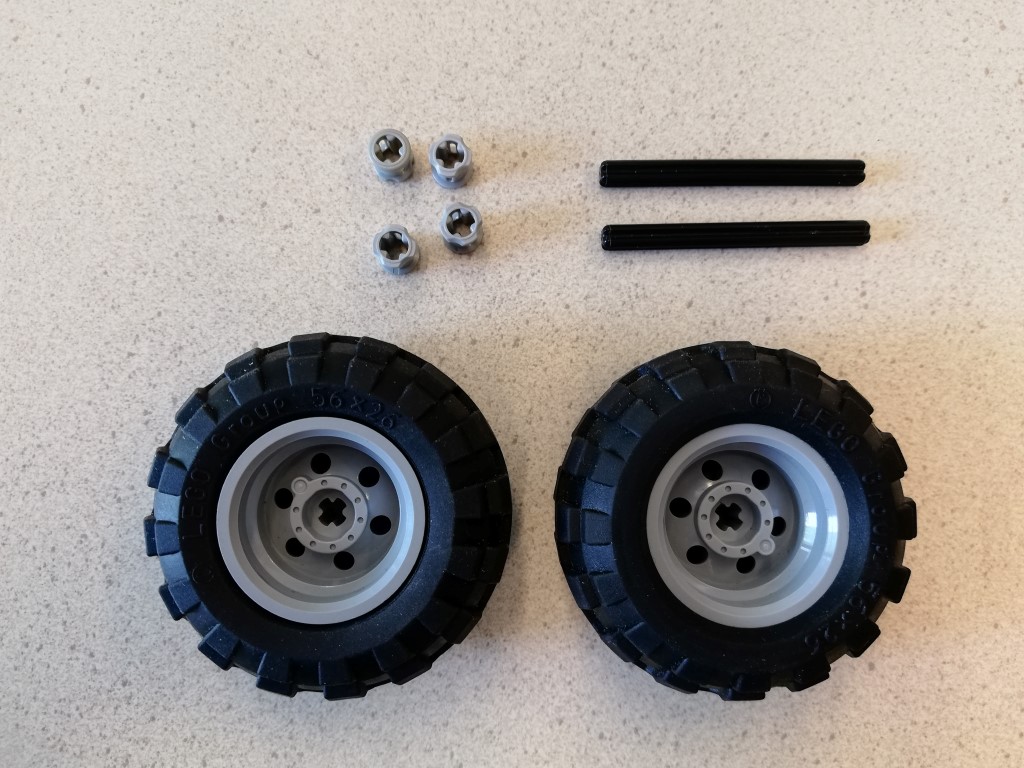
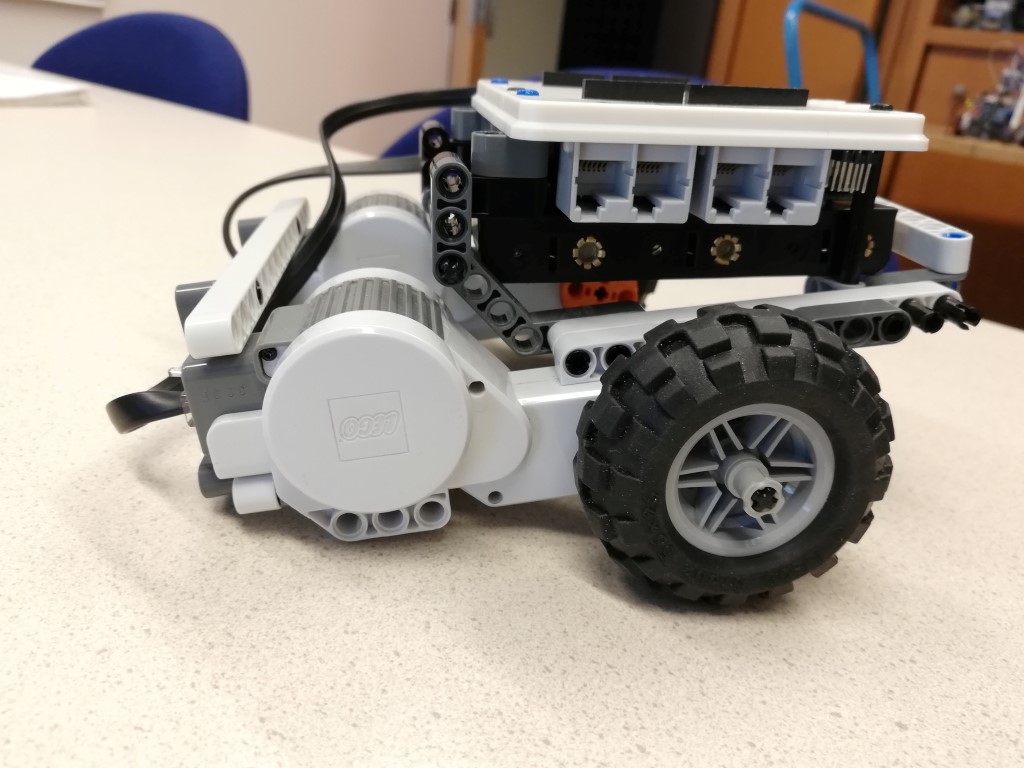
Add two wheels to the motors


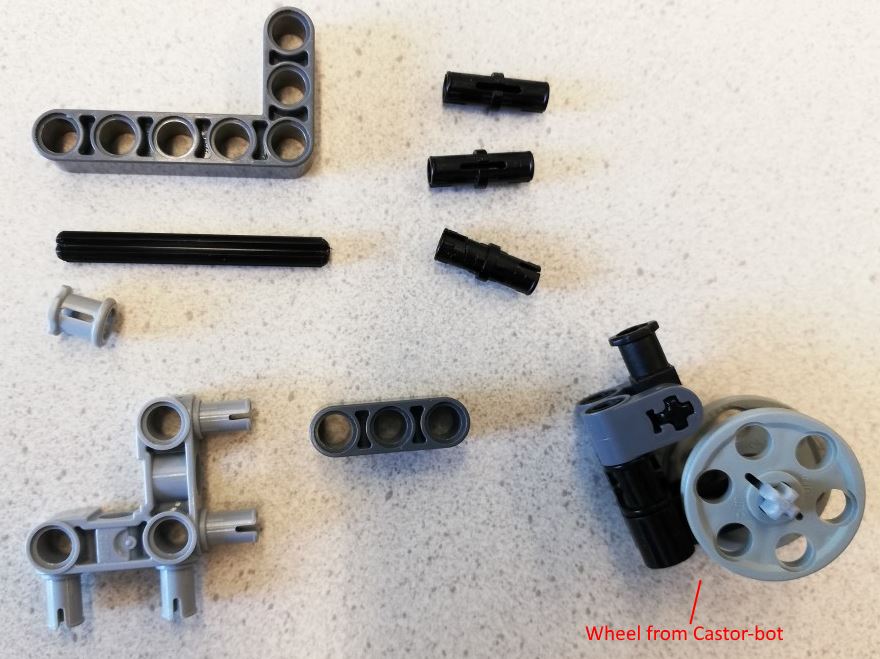
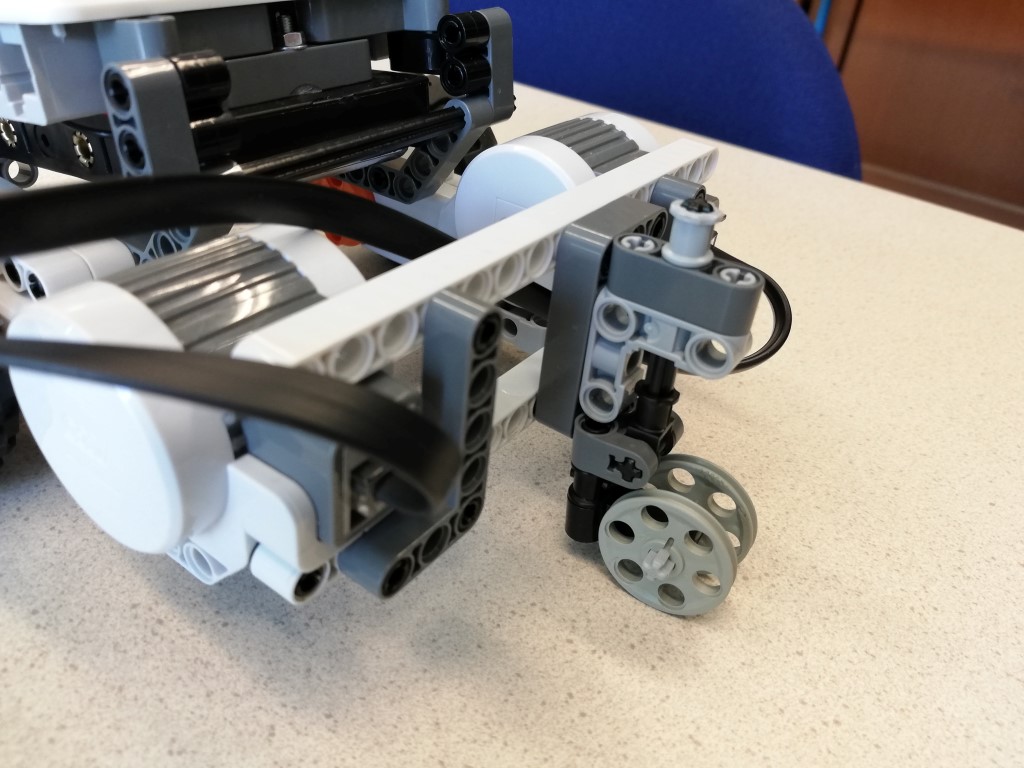
Make rear wheel
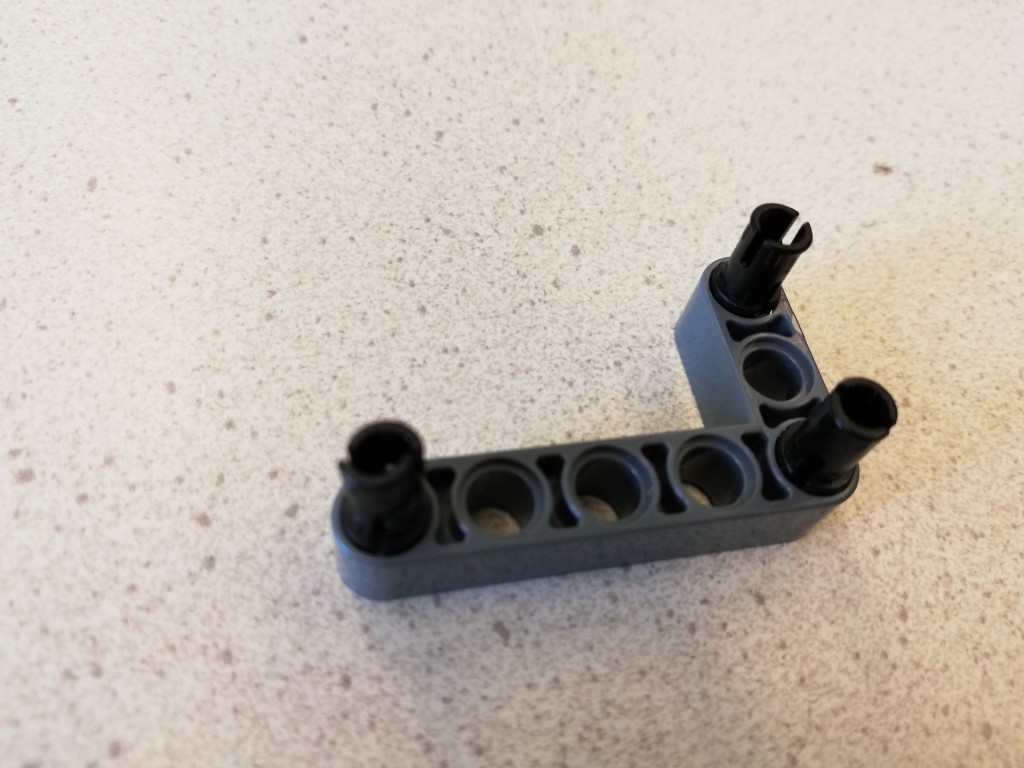
Follow step 7-9 of the Castor bot building guide to make the small wheel. Then add it to the rear:


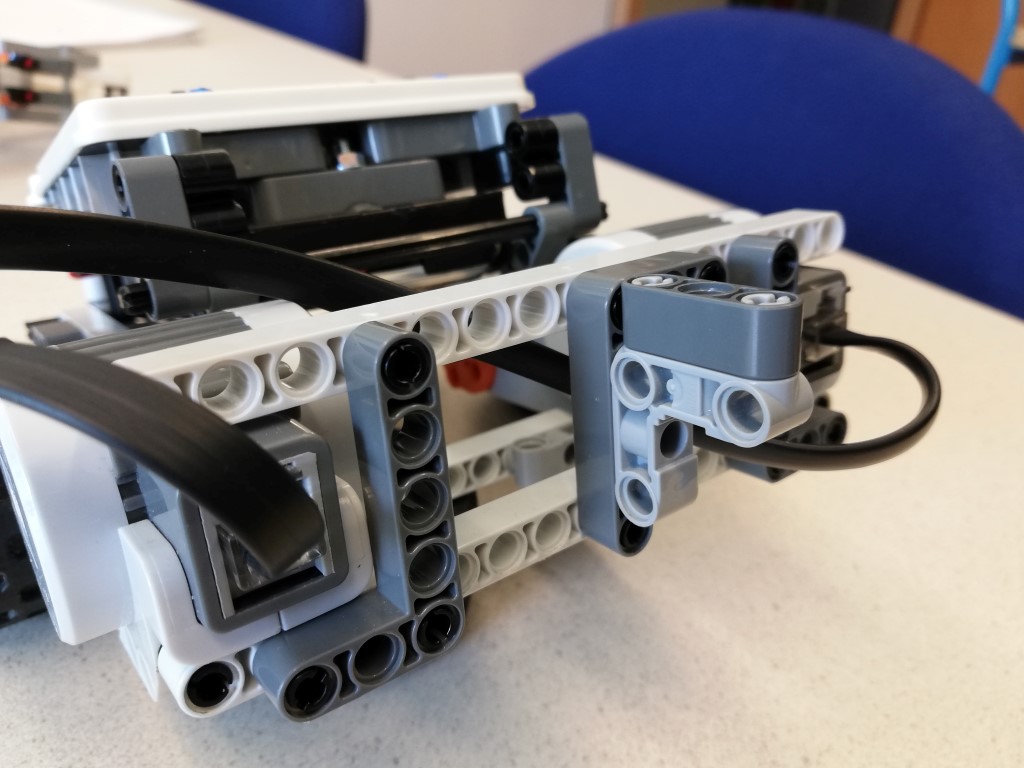
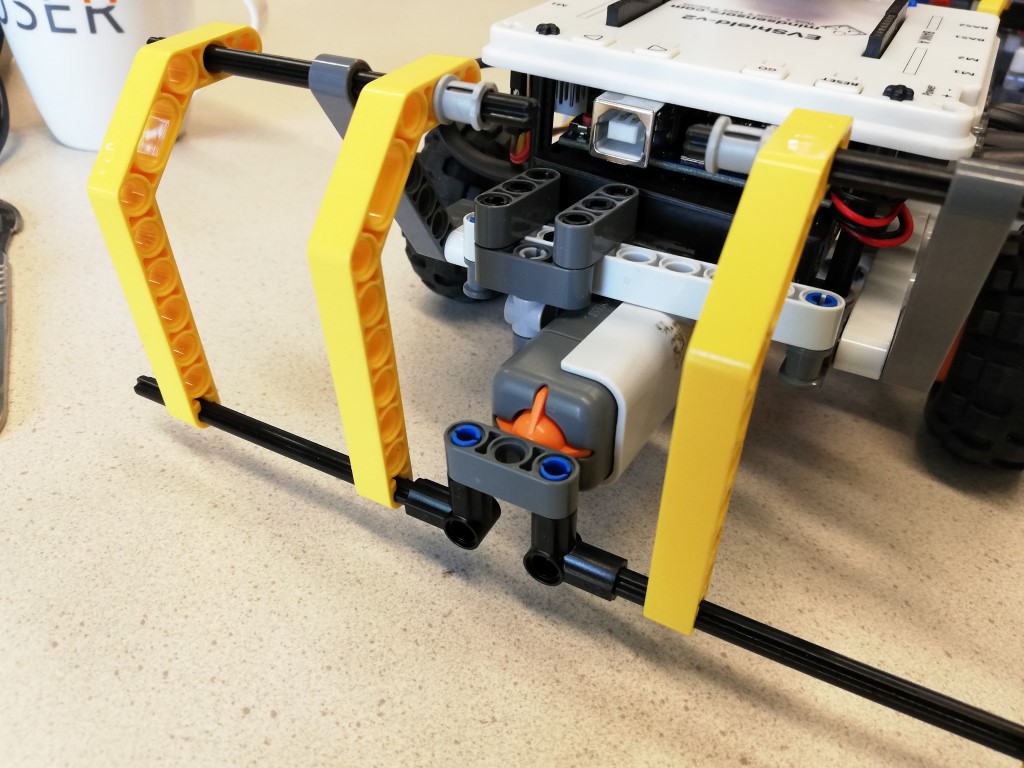
Add bumper with touch sensor
You may use your imagination, added with the instructions for the Bumper car and the examples below to add a bumper.
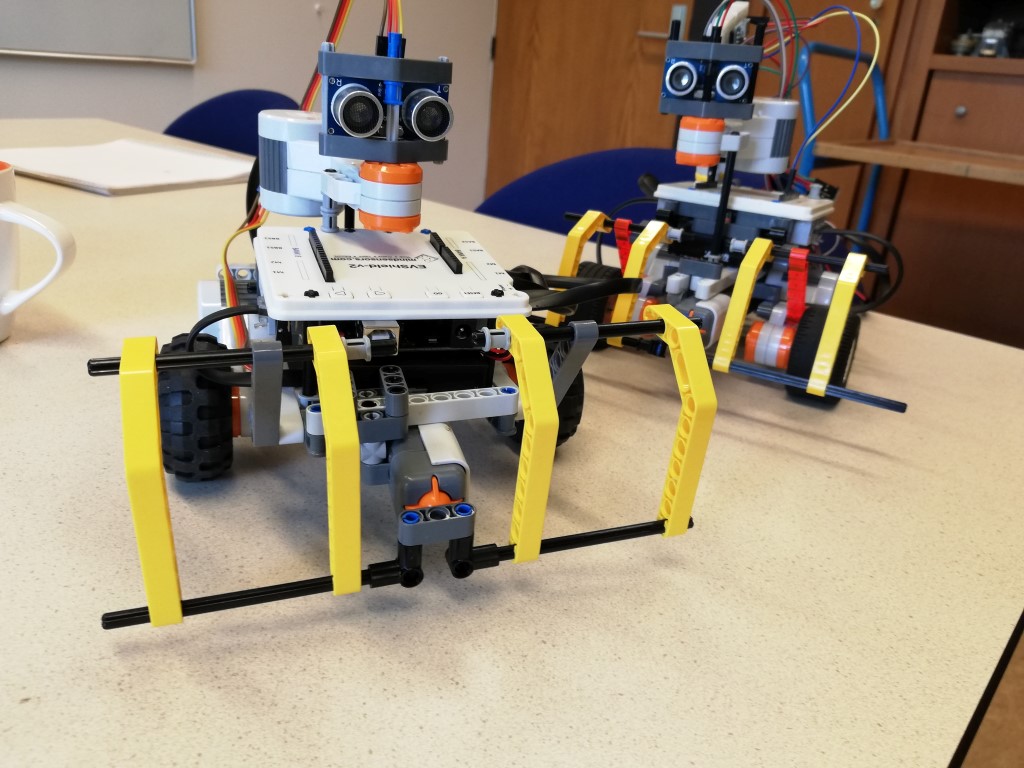
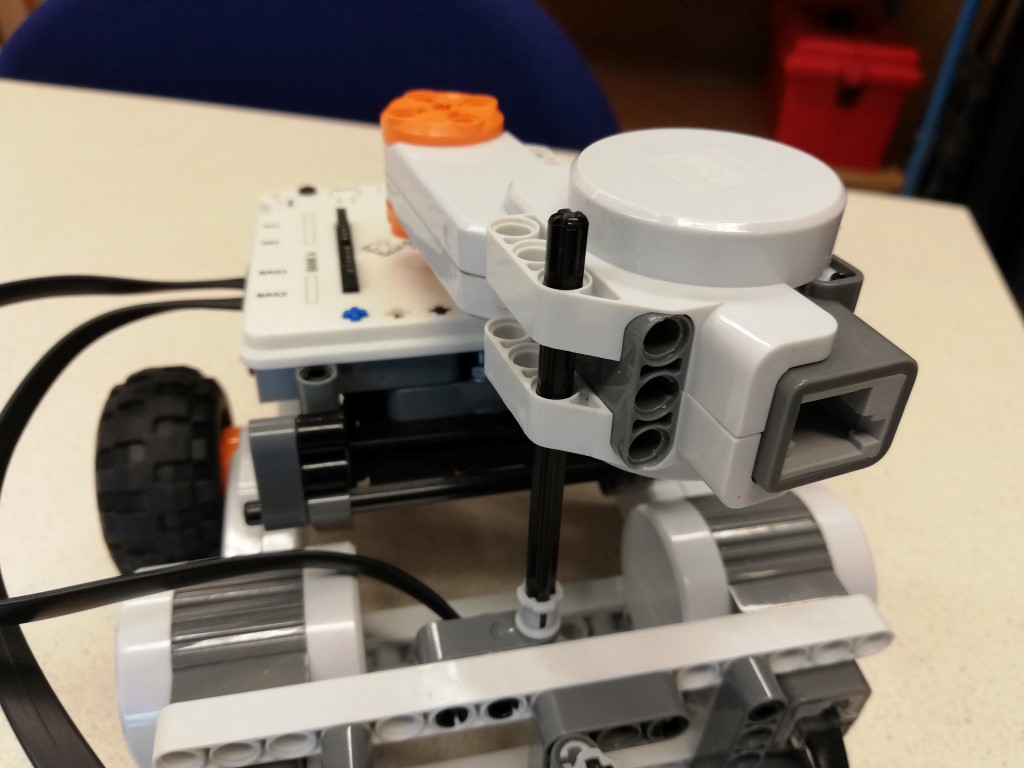
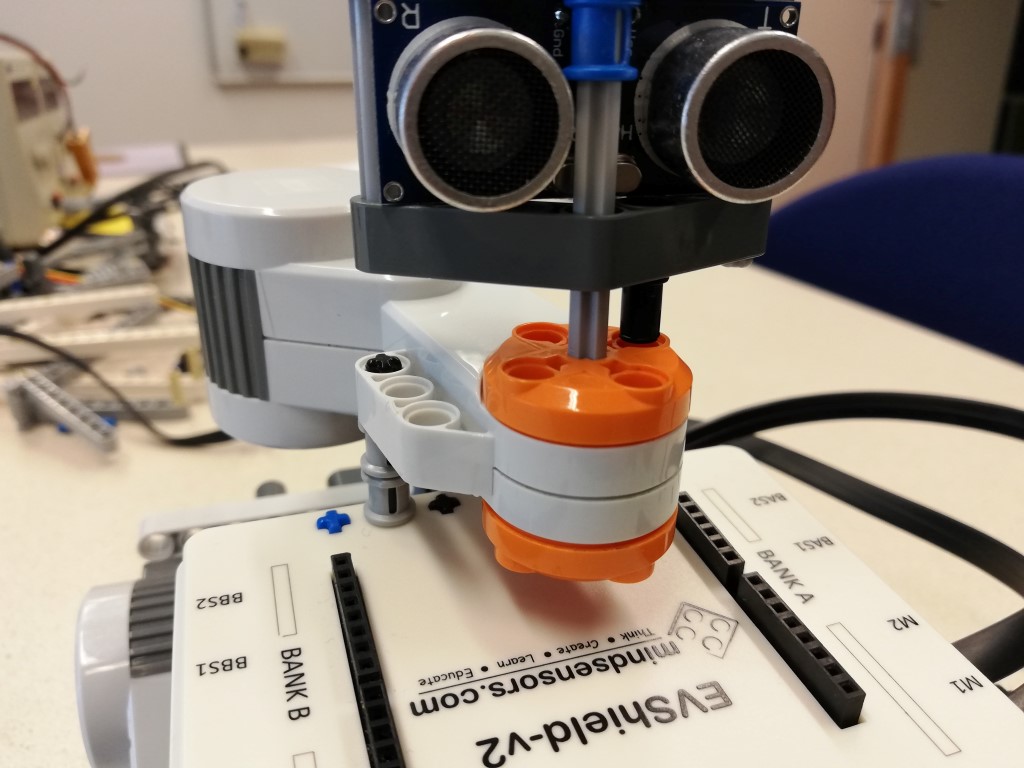
Add motor on top with ultrasonic sensor
The motor will be mounted in such a way, that it can be quickly removed.


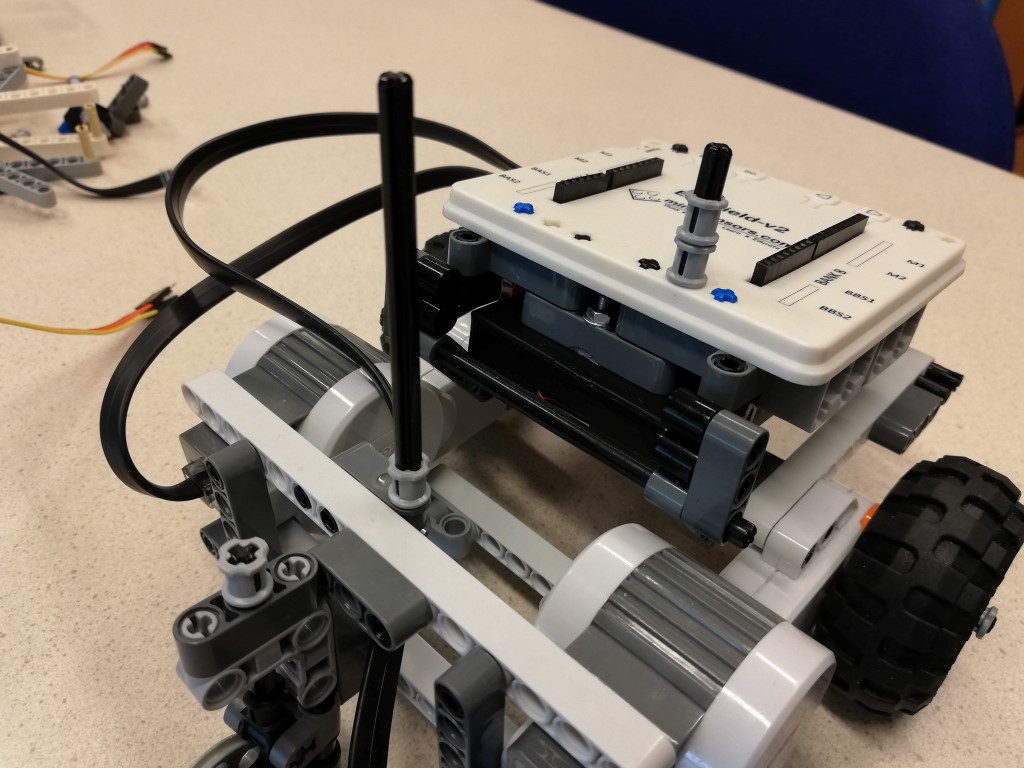
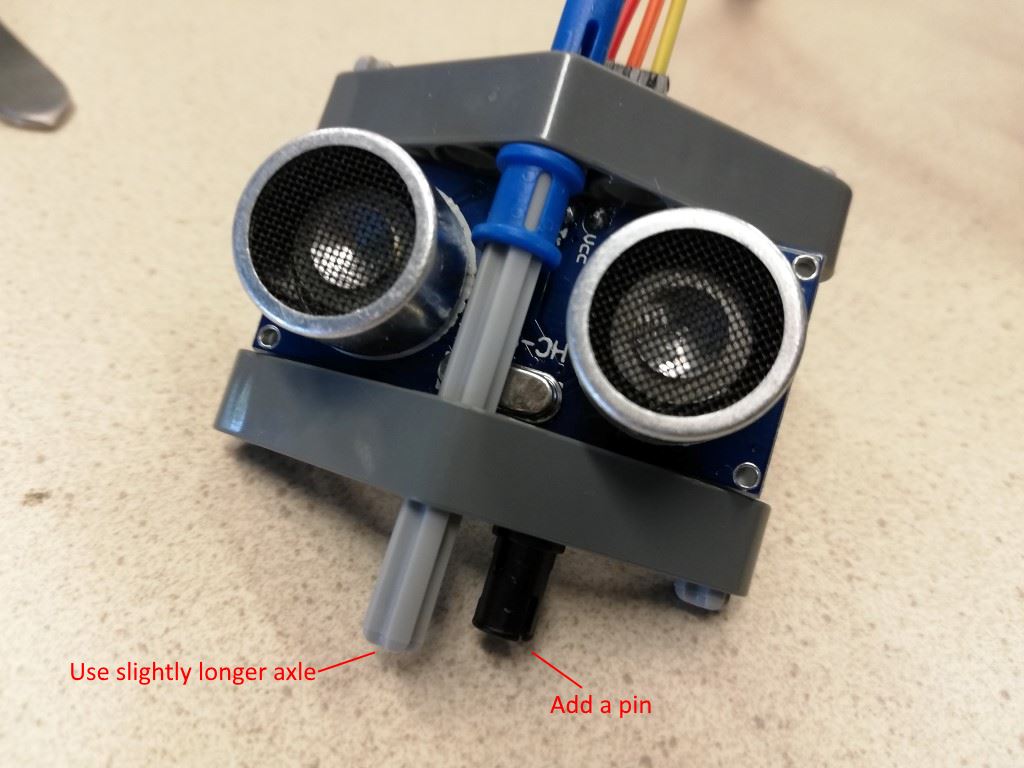
Mount the ultrasonic sensor. Replace the axle with a slightly longer one, and add an extra pin to ensure a firm connection to the motor (the sensor will rotate, so it must be connected well):

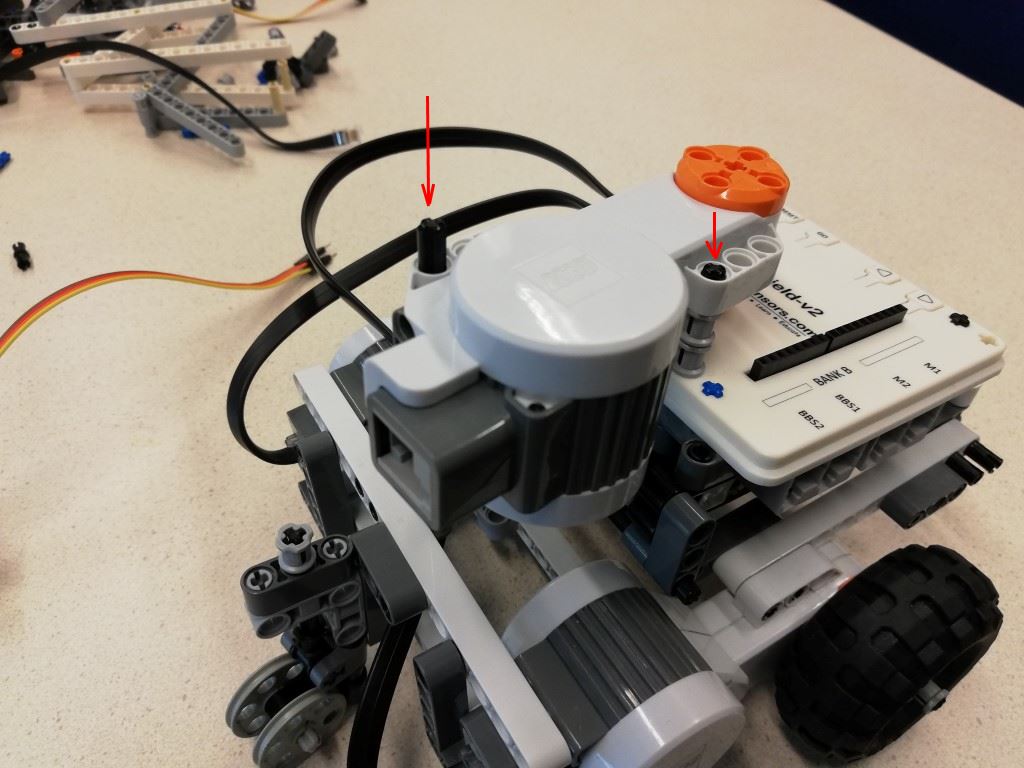
Connect the cables. Extend the cable if necessary with a extra set of female-female jumper cables:
(how to connect the sensor to the servo-headers of the shield was explained here)
Program it
You can use this example “Explorer” sketch to test the robot.